Michael Philetus Weller's Projects


The vktrjwlz project is a javascript library and a series of generative algorithms to grow unique jewelry designs to be fabricated on a laser cutter. Each algorithm defines a style that is applied to grow each unique piece from a random seed. The lzr library supports creating vector panels with holes, rendering panels in the browser and generating dxf files to be laser cut. The pieces are cut out of stainless steel on Metrix Create:Space's LPKF laser.

An ongoing project to create a design tool for creating 2D parametric specifications that can be shared as a web page and edited through a browser. The goal of this project is to provide better communication of high-level design intent by allowing experts with domain knowledge (for example in areas such as fabrication or biomimicry) to embed their knowledge in designs as parameters and constraints; viewing these designs and adjusting the parameters will not require any specialized software beyond a
browser.
Papers
C Xu, MP Weller. Butterfly CAD: Shareable & Editable 2D Parametric Specifications for
Fabrication, CHI 2016 workshop on cross-disciplinary fabrication. pdf
This installation, developed for the Market Street Prototyping Festival in San Francisco, solicits streetsourced answers to crowdsourced questions.
Two doorways stand in the middle of the sidewalk, with a question displayed on a sign above them, and one answer over each door. Walk through the door, and your vote will be counted, viewable both at the door and on the Vote with Your Feet website.
Breathym is a chest band that monitors and visualizes your breathing rhythm with ambient light. The band has a stretch sensor that measures your chest expansion, and dims & brightens the lighting in sync with your breathing.
A chest strap senses your breathing pattern and communicates it via bluetooth to a phone, which then controls the brightness of the ambient light via wifi with the Philips Hue system.





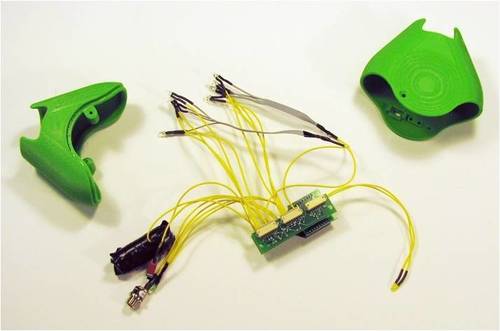
The Printronics project is a kit of circuit boards designed to be inserted into a 3D printed part with integrated printed circuits created by using a two-material printer with one non-conductive material for the structure and another conductive material to create circuits. Each board has a different component such as an RGB LED or an accelerometer, and they communicate and transfer power over a common bus. As current conductive filament has too much resistance to create an effective circuit bus the demonstration cute octopus and tetradie we built use stranded wire for the bus.





Posey is a computationally-enhanced poseable hub-and-strut construction kit. Its hub-and-strut form maps to model anything that can be described in a graph structure, for example an articulated skeleton, a chemical molecule, a kinematic linkage or a building structure.
Posey's hubs and struts are optocoupled through the ball and socket joints using infrared LEDs and photosensors. LEDs embedded in each ball send serial data to photosensors in each socket. Wireless transmitters in the hubs send connection and geometry information to a host computer. The host computer assembles a representation of the physical model as the user creates and configures it.
We developed several applications that accept input from the Posey kit, including the Puppet Show character modeling and animation program (shown in video below), the Escape Machine state machine puzzle game, and an organic chemistry library that uses Posey to look up molecules containing a substructure built with Posey.
Papers
MP Weller, EYL Do, MD Gross. Posey: instrumenting a poseable hub and strut construction toy, Tangible and Embedded Interaction 2008. pdf
MP Weller, EYL Do, MD Gross. Escape Machine: teaching computational thinking with a tangible state machine game, Interaction Design and Children 2008. pdf
MP Weller, EYL Do, MD Gross. Tangible Sketching in 3D with Posey, CHI 2009. pdf
MP Weller, EYL Do, MD Gross. An optocoupled poseable ball and socket joint for computationally enhanced construction kits, Robot communication and coordination 2009. pdf


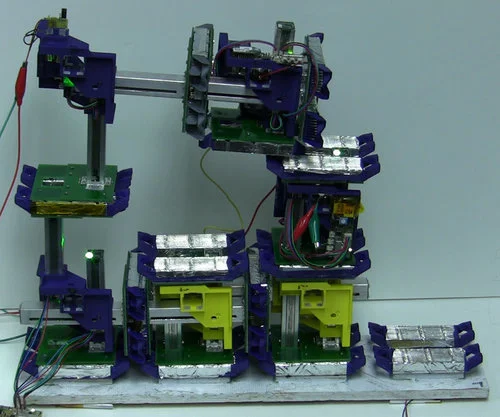



The goal of the Prismatic Cubes project is to demonstrate the feasibility of brick-scale modular robots capable of reconfiguring themselves into arbitrary forms. We built 6 Prismatic Cube modules in order to demonstrate the two movement primitives necessary for general reconfiguration, walk and round (shown in videos below). A larger number of modules could leverage these movement primitives to self-reconfigure into more complex forms, for example the social table that expands as people sit down (illustrated above), or instantiation of arbitrary forms (as shown in the 3rd video below).
Orthogonal translation of 2 Prismatic Cubes across test jig
6 Prismatic Cubes rounding a corner
A simulated run of 10 million modules self-reconfiguring into the shape of CMU's Gates computer science building, by the Claytronics group
Papers
ME Karagozler, JD Campbell, GK Fedder, SC Goldstein, MP Weller, BW Yoon. Electrostatic latching for inter-module adhesion, power transfer, and communication in modular robots, Intelligent Robots and Systems 2007. pdf
MP Weller, BT Kirby, HB Brown, MD Gross, SC Goldstein. Design of prismatic cube modules for convex corner traversal in 3D, Intelligent Robots and Systems 2009. pdf
MP Weller, MD Gross, SC Goldstein. "Hyperform specification: designing and interacting with self-reconfiguring materials," Personal and Ubiquitous Computing 15(2), 2011. pdf


The Espresso Blocks project explored the possibility of using brick-scale modular robots to create rapidly deployable live/work spaces such as an espresso stand that could reconfigure into a sleeping pod at night. The video below shows a simulation (developed as an AutoCAD plugin) demonstrating cubic modular robots self-reconfiguring from a 4x4 stack to a 2x8 stack.
Papers
MP Weller. Espresso Blocks: Self-configuring building blocks, M. Arch. Thesis, University of Washington, 2003. pdf
MP Weller, EYL Do, MD Gross. EspressoCAD: A system to support the design of dynamic structure configurations, Generative CAD Systems 2004. pdf
MP Weller, EYL Do. Architectural Robotics: A new paradigm for the built environment, Design Sciences & Technology 2007. pdf



A lightweight construction system to allow the rapid and autonomous deployment of planetary facilities on the moon and Mars. A robotic factory and a supply of lightweight materials would be shipped from earth on an autonomous mission. Once on-site the robotic factory would begin constructing modular robotic building blocks from these materials.



Now that robot servants such as the roomba have finally arrived to populate our houses we are looking to take the next step: our houses themselves could be made of a large number of simple robots, a sort of swarm of bricks. Hive Bots allows participants to explore how swarm intelligence could be applied to robotic architectural systems. By joining a swarm and following the rules shown on cards participants construct a hive out of cardboard building block cells without explicit coordination.
Tower rules - pdf
Beanstalk rules - pdf